報道資料
ここに掲載されている情報は、発表日現在の情報です。
検索日と情報が異なる可能性がございますので、 あらかじめご了承ください。
1998年6月10日
エンタテインメント・ロボット用アーキテクチャー『OPEN-R』を開発
本アーキテクチャーに基づく4足歩行型ロボットを試作
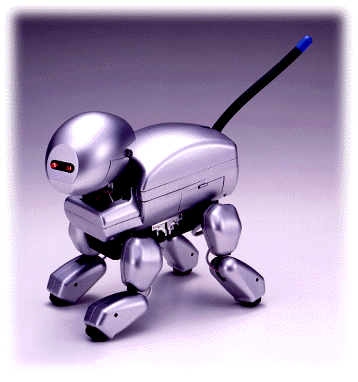 「OPEN-R」に基づくエンタテインメント・ロボット試作機
「OPEN-R」に基づくエンタテインメント・ロボット試作機
ソニーは、脚部などのハードウェアモジュールを交換することで機能や形態を変えたり、ソフトウェアモジュールを変更することにより行動や反応パターンなどを容易に変更できるエンタテインメント・ロボット用アーキテクチャー『OPEN-R(オープン・アール)』を開発しました。
エンタテインメント・ロボットは、産業用ロボットなどと異なり、趣味や娯楽などの用途を目的とした新しい分野のロボットです。『OPEN-R』は、この新しいロボット分野の実現を目的として開発され、ハードウェアおよびソフトウェアのモジュール化という従来の産業用ロボット分野にはない特長をもっています。
『OPEN-R』の主な特長
-
ハードウェアモジュール交換によるロボット形状の変更
脚部などのハードウェアモジュールを交換することで、4足歩行型や2輪走行型など用途に応じたハードウェア構成を実現できます。簡単に着脱できるメカニカル構造を採用することで、特殊な工具などを用いることなくハードウェアモジュールの交換が行えます。
-
ハードウェア情報の通信によるプラグ&プレイ機能
各ハードウェアモジュールには、それぞれを制御するために必要な性能や形状・慣性モーメントなどの基本データが、ハードウェア情報として組み込まれています。本体CPUは、各々のハードウェアモジュールが装着された時点で高速シリアルバスを介してハードウェア情報を通信し、ロボット全体のハードウェア構成や運動性能などを認識、各ハードウェアモジュールに最適な運動制御信号を算出し制御を行います。そのため、脚部などの交換を行っても運動制御プログラム自体を交換する必要はなく、モジュールを交換するだけで最適なハードウェア性能を引き出すプラグ&プレイ機能を実現することが可能です。
-
交換可能なソフトウェアモジュール
ロボットの行動や反応パターンを担う応用プログラムなどもモジュール化され、本体のカードスロットを通してCPUに供給されます。目的に応じたモジュールを記憶したメモリーカードを用意すれば、メモリーカードを交換するだけでロボットの反応パターンなどが変更できます。ペット型やゲーム型などの応用プログラムの他、画像/音声認識などの情報処理プログラムも、ソフトウェアモジュールとして簡単に変更・交換できるため、多彩なロボットアプリケーションを実現できます。
-
多機能化に対応する拡張性
本体カードスロットには、メモリー以外の機能拡張カードも利用できます。無線機能カードやネットワークカードなどの機能拡張カードを用意すれば、無線コントロールや複数台のロボットを連携させたアプリケーションなど、ソフトウェア処理だけでは難しいロボットの利用形態にも対応できます。
ソニーは、『OPEN-R』をロボットの基本アーキテクチャーとして用いながら、将来のエンタテインメント・ロボット分野の創造に向けたさらなる研究開発を進めてまいります。
『OPEN-R』の概要
参考資料
試作機の主な仕様
4足自律型歩行ロボット(4足歩行型ハードウェアモジュール装着例)
-
CPU
:MIPS 64ビットRISCプロセッサー
-
主記憶装置
:8MB DRAM
-
オペレーティングシステム
:Aperios(ソニー独自のリアルタイムOS)
-
外部記憶装置
:PCカード(タイプII×2スロット)
-
画像入力
:CCDカラービデオカメラ(1/5型18万画素)
-
音声入力
:ステレオマイクロフォン
-
音声出力
:スピーカー(モノラル)
-
可動部
:脚部 3自由度 × 4脚
頭部 3自由度
尾部 1自由度 計:16自由度
-
歩行速度
:約5m/分
-
質量
:約1.25kg(バッテリー含む)
-
最大外形寸法
:132×250×235mm(幅×高さ×奥行、尾部含まず)
-
電源
:7.2V(リチウムイオン2次電池使用)
4.8V(ニッケルカドミウム2次電池使用)
搭載アプリケーション・モジュール
-
動作
:4足歩行、座る、立上がる、寝転がるなど
-
画像処理
:色領域選別、動き検出など
2輪走行型ハードウェア・モジュール
-
可動部
:2自由度
-
最大外形寸法
:160×128×72mm(幅×高さ×奥行)
-
質量
:約0.35kg