Initiatives
Sony Technology Day 開催レポート Vol.4
「Exceed - 人の能力を超える」
2019年12月6日
019年9月18日に開催された“Sony Technology Day”では、「つなぐ」「解き放つ」「超える」の3つのテーマで技術展示を行いました。ここでは「超える」のテーマ、“人の能力を超える”イメージセンサーやロボティクス関連の技術展示をご紹介します。
人には見えない光の特徴を捉える
偏光イメージセンサー技術
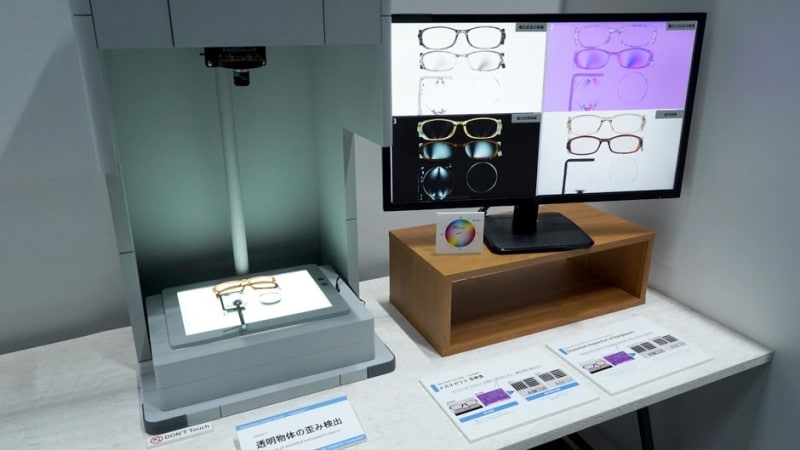
偏光イメージセンサーは、人の目では見ることのできない光の3つ目の要素である”偏光”を捉えることで、今まで見えなかった事象を可視化します。デモでは、人間の目ではほぼ視認できない模型の車に付いた傷が、偏光センサーを通すことではっきりと可視化できる事例と、メガネのレンズなど、透明な物体の歪み検出の事例を紹介しました。
半導体プロセスにおいて1画素毎に微細な偏光素子を形成し、光の偏光状態を高精度に取得可能な世界初の技術Polarsens *を搭載したセンサーを開発。このセンサーを信号処理(AI)と融合し、さまざまな市場に新たな価値をご提案します。
* Polarsensはソニー(株)の商標です。

車載CMOSイメージセンサーとセンサーフュージョン技術
車載CMOSイメージセンサーとセンサーフュージョン技術は、いち早く周辺の状況の変化を察知して迅速な危険回避行動を支援します。デモでは、肉眼では視認できないほどの低照度時でも、車載CMOSイメージセンサーを搭載したカメラで撮像すると歩行者や標識が視認でき、LEDの標識や信号機が、フリッカー(ちらつき)なく認識できる様子を紹介しました。
デジタルカメラ、スマートフォンなどで培ってきた最先端のCMOSイメージセンサー技術を車載品質に適合させながら、課題を克服することで、車載特有の難しいシーンである、低照度環境での物体検出、高速走行中の遠距離物体の検出、LEDフリッカーのちらつきなどに対応しています。
さらに、カメラだけでは物体形状を捉えられない逆光や霧が発生するシーンや、レーダーの乱反射によってノイズが発生するトンネルや鉄橋などのシーンでも、CMOSイメージセンサーとレーダーを組み合わせるセンサーフュージョン技術によって、高精度な物体認識を実現しています。従来方式では個々のセンサーの処理結果を用いていましたが、ソニーが開発しているセンサーフュージョン技術では、センサーを自社開発しているソニーだからこそできる、それぞれのセンサーのRawデータと呼ばれる処理前のデータから抽出した物体の特徴量を融合することにより物体認識の精度を高めています。

低消費電力ビジョンセンシングプロセッサと
リアルタイム3Dセンシング技術
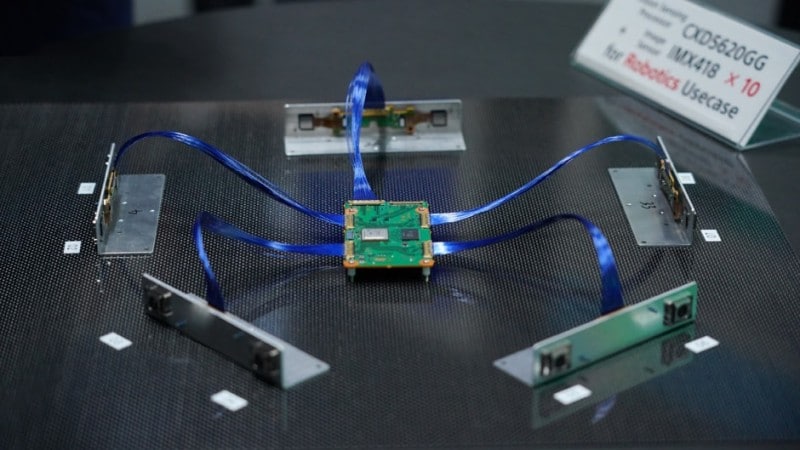
多数のイメージセンサーの入力を、一度にエッジ側のビジョンセンシングプロセッサに入力して処理する2D/3D空間センシングシステムは、“aibo”やドローンなどの自律駆動型のロボットに対し重要な役割を担っています。さまざまなセンサーを用いて自己位置推定、画像認識、障害物検知を行っており、安全性、高速性、安定性、省電力化が課題です。
今回、新たに開発したビジョンセンシングプロセッサは最大12個のイメージセンサーと、ジャイロや加速度センサーなどを処理することで、周囲の状況を測距して自己位置を推定し、地図作成を行うことが可能です。このビジョンセンシングプロセッサは、その内部にソニー製のオープンソースNeural Network LibraryのInference機能を搭載しているため、Neural Network Consoleで作成した独自のカスタムな認識器・推論器も動作させることが可能です。

人をより器用にする精密バイラテラル制御

「人と協調し活躍するロボット」の実現には、ロボットが人や環境と触れ合うための“力の制御”、人と比べてロボットが得意とする“精密な動作”、そして“知能”の3つの技術が重要だと考えています。
デモでは、“力の制御”と“精密な動作”の技術を用いて1/10スケールの世界に触れる様子を紹介しました。
人が操作する動きが、1/10のスケールで精密操作ロボットに伝わり動作し、ロボットからの力のフィードバックは10倍に拡大されて操作する人に伝わり、小さなものでも直接触れているような感覚で操作が可能になります。
小さな力の変化を感じながら、人の手の限界を超えた精密操作を可能にする技術は、「高感度センシング技術」「先端細径メカ構造」「位置と力の精密制御」です。高感度センシング技術では、精密操作ロボット先端部の金属に8本の光ファイバーを取り付け、金属のたわみによって変化する光の波長の計測によって加わった力の向きと大きさを割り出しています。この技術を適用したバイラテラル制御の実現は世界初となります。



